Skip to content
blog
links
theory
Tags
labs
I am flower
gel plates
logo+turte
identitarium
sewing room
VR
3D print
texturista
laser engraving
AI
patternista
geometric
organic
bitmap
plotter+bots
photo-graphic
cyanotype
videoart
lego-tarium
s.t.e.a.m
tools
digital tools
contact
labs
labs by tekiela
blog
links
theory
Tags
labs
I am flower
gel plates
logo+turte
identitarium
sewing room
VR
3D print
texturista
laser engraving
AI
patternista
geometric
organic
bitmap
plotter+bots
photo-graphic
cyanotype
videoart
lego-tarium
s.t.e.a.m
tools
digital tools
contact
labs
labs by tekiela
Menu
stepper
Easy Driver
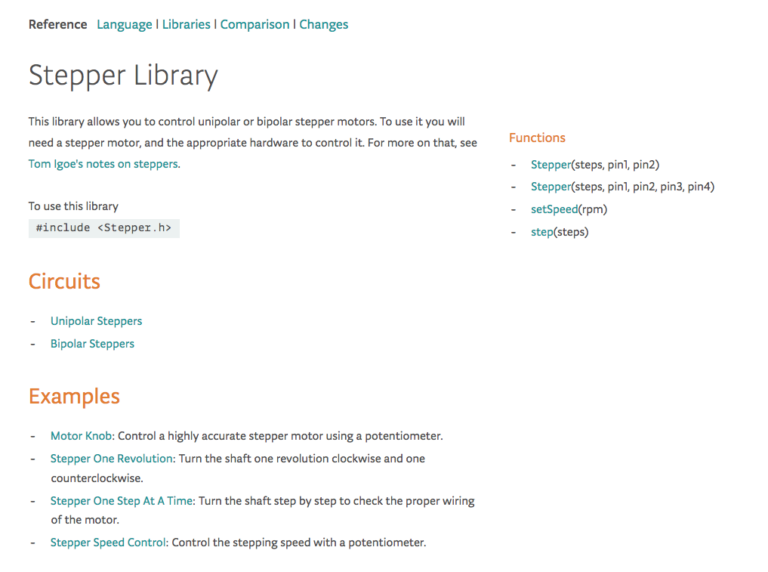
arduino – stepper library
sS8byj-48 stepper + uln2003 driver
Raspberry Pi CNC Hat V2.58 GRBL v1.1 Compatable
DRV8825 Stepper Motor Driver Module
5V Stepper Motor 28BYJ-48Drive Test Module Board ULN2003 5Line 4Phase Kit
stepper motor basics
Nema 17 Stepper Motors